
This post is about work I’ve done with The Crafty Robot but as it is more a story about design and technology experimentation and development, than a project writeup, it felt like it fitted here better.
Cardboard telepresence experiments
When the pandemic first started I was desperate to do something about the heartbreaking way it was separating people.
In designing Smartibot originally, I had tried to create a piece of electronic hardware that could easily be adapted to different uses (by users, but also myself) with only mechanical design (through hand making, hacking existing physical products, doing 3D printing or making kit expansions) and writing simple software (like web-apps and device firmware in JavaScript or with code blocks).
I realised that telepresence (allowing someone to drive a robot around over the internet in order to be more ‘present’ in a space that they are physically separated from) could be one of these uses, and with a little bit of new software I could allow owners of the few thousand Smartibots that were already out there to use them as basic telepresence robots.
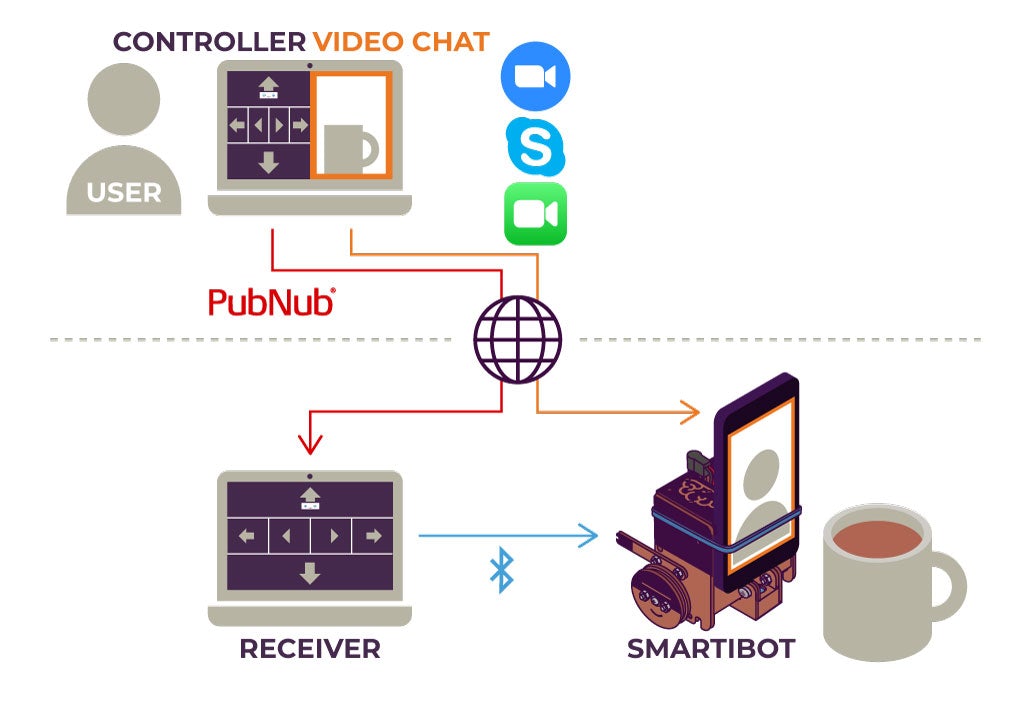
Put together a quick pair of web-apps (one for the ‘pilot’ and one for the robot), using PubNub to handle the communication of the driving commands, and letting users use whatever app they wanted for the actual video call (this meant that users at the robot end of the connection needed two devices, one to put on the robot which handled the video call and one running the web-app that worked as the relay for the controls). I published a writeup of how to get it all working and a video and it proved quite popular, suggesting that there might be an appetite for a better developed version of the idea.

A product
I started to work on a properly integrated telepresence system that would work with a single device with Altrubots (who got in touch after seeing the writeup and had been working on a system to allow people to control rubbish cleanup robots over the internet).

Using the original system with the A.I. Bot chassis that comes in the Smartibot kit I realised that, in order to be able to fully interact with people in a space it would be very helpful to be able to tilt the phone, allowing you to look up and down. The Smartibot kit only includes two motors so it made sense to do an expansion kit that included a third motor and a new cardboard chassis designed specifically for telepresence.

With a new cardboard robot design and a mostly intact telepresence system we took it to Kickstarter to get enough pre-orders to finish the software and put the expansion into production.
Cardboard Wolfenstein 3D (first person game)

I realised that the experience of driving the robot around and seeing from its point of view felt a bit like playing a first person computer game. I wanted to make a bit of content that would raise the profile of the Kickstarter campaign so I built a cardboard recreation of the first, first person game I remember playing, Wolfenstein 3D. I made a robot that could hold a phone and had a pixelated fist attached to a small servo, allowing players to drive themselves around the labyrinth and punch Nazis (detailed writeup here).
I posted the link to drive the robot on Reddit and ran the game for a few days. The people of Reddit really liked it and I had people come and play from all over the world. It was a strange and magical experience, having the robot suddenly spring to life in my studio, being controlled by a random person in a random location. Sometimes they would enable their microphone and camera and we would have a brief chat. At that time, here in the UK, we still were not having many social contacts, so it felt nice to connect with people.
It also turned out that the a telepresence system connected to a small and flexible robotics platform works surprisingly well as a game engine.
Remote telepresence game workshop (first person games)
Fellow designer and researcher Dries De Roek was an original Smartibot Kickstarter backer and been following the progress of the Smartipresence system. He suggested that I run a workshop as part of the annual Thingscon conference’s 2020 incarnation, the remote-only Good Things Fest, based on making telepresence games.
A few weeks before the workshop I sent each participant a Smartibot kit and a couple of small servo motors. During the workshop we used cardboard modelling techniques to built a basic cardboard chassis and then participants modified theirs and put together a game experience around them. At the end of the workshop we all played each others’ games. There is a more detailed write up over at The Crafty Robot.
Robot unicorn jousting (third person game)
In the spring of 2021 I was asked by the amazing Emma Beaman (who runs the wonderful Playful Anywhere a Leeds-based organisation who make wonderful playful things happen, some of which I’ve been fortunate enough to have got involved with in the past) to run an activity as part of Love To Play, which was a remote event that felt like a mixture of lovely play experiences and fascinating reflections on what play actually is.
I had recently made a simple jousting game by putting paper figures with lances on top of the cardboard unicorn chassis we include in the Smartibot kit, mainly to entertain our toddler. I figured that the Smartipresence system might work just as well for third person games as first person ones, in which case the Smartipresence system combined with the jousting game could be a good fit for Emma’s event.

It was! I set it up with a webcam for the main event feed looking across the centre of the playing field and two smartphones on tripods behind each robot unicorn. We had a jousting tournament with participants taking in in turns to control the unicorns for each jousting bout.


